
Luftgestützte Inspektion mit unbemannten Flugsystemen
Die Inspektion von Infrastrukturbauten ist generell ein Thema von immer größer werdender Bedeutung für die Bauindustrie in Deutschland und der Welt. Zusätzlich wird ein verstärkter Bedarf an neuen Anwendungen für die zerstörungsfreie Prüfung (zfP) nachgefragt, die eine Remote-Überwachung ermöglichen und ein eindeutiges Monitoring-Management liefern.
Medien





Betrachtet man die herkömmlichen, seit Jahrzehnten im Einsatz befindlichen Inspektionsmethoden, ergibt sich sehr schnell eine Problemstellung zwischen erforderlicher und tatsächlich vorhandener Datenlage hinsichtlich der Zustandserfassung für Infrastrukturbauten. Grundlage für eine solide und lückenlose Begutachtung solcher Objekte ist eine umfassende Datenbasis, die jedoch im realen Fall entweder nur mangelhaft vorliegt oder aber nicht existiert. Dies gilt vor allem für den Bereich der Prüfung von sehr schwer zugänglichen Bauten, die sich durch ihre außergewöhnliche Lage, Größe oder einen speziellen Aufbau auszeichnen. Deutlich wird dies schon beim Ziel der simplen Inaugenscheinnahme von Brücken oder Türmen, deren Durchführung nur mittels intensivem personellen Einsatz, sowie erheblichem organisatorischen und materiellen Aufwand realisierbar ist, jedoch aufgrund fehlender Systeme für die Erfassung solcher Daten ohne entsprechende Alternative bleibt. Genau an dieser Stelle kommt nun die Technik der unbemannten Flugsysteme zum Tragen, welche als fliegendes Sensorsystem die Datenakquisition unter Einsparung von personellen und materiellen Kosten zeiteffektiv vornehmen kann und zudem nicht auf die sonst nötigen Vor- und Nachbereitungen wie Gerüstaufbauten oder Hubsteiger angewiesen ist.
Ausgangslage
Schon seit Jahrzehnten werden bemannte Fluggeräte neben dem reinen Personen- und Frachttransport für die vielfältigsten Aufgaben eingesetzt, angefangen bei der Überwachung von Meeresverschmutzungen über die luftgestützte Kartografierung bis hin zur Kontrolle von Überlandleitungen oder Staatsgrenzen. Erst innerhalb der letzten zehn Jahre, vor allem bedingt durch die Entwicklungen neuer Technologien im Bereich der Mikroelektronik und Informationstechnik, wurde der Einsatz von unbemannten Fluggeräten (unmanned aircraft systems, UAS) vermehrt vorangetrieben. Als Motivation für den Einsatz solch unbemannter Systeme steht zum einen die Einsparung von Flugpersonal sowie dessen geringeres Gefährdungspotenzial, als auch die Reduzierung von Anschaffungs- und laufenden Kosten. Hauptinitiator war und ist hier das Militär, welches unter Nutzung enormer finanzieller Ressourcen die UAS-Entwicklung maßgeblich beeinflusst. Die militärisch geprägte Forcierung der UAS-Weiterentwicklung wird allerdings weltweit sehr stark auf ziviler bzw. universitärer Forschungsseite umgesetzt, in Deutschland meist gefördert durch nationale oder europäische Forschungsprogramme, deren Zielsetzung thematisch stark variiert. Das Hauptaugenmerk liegt aber oftmals auf den Themen Kommunikationsnetzwerke, Schwarmverhalten oder Mediengestaltung – also auf dem Gebiet der Elektro-, Nachrichten- und Informationstechnik –, da sich die angestrebten Anwendungen oft sehr nah an der Medien- oder Informationslandschaft orientieren. Doch es gibt zunehmend auch Bestrebungen, UAS zu Überwachungszwecken oder im Bereich der Geowissenschaften hinzuzuziehen. So existieren einige Forschungseinrichtungen, die sich der Verbindung zwischen UAS-Technik und Photogrammetrie als möglicher Ersatz zu bereits existierenden Fernerkundungs- und Vermessungsverfahren widmen. Hierbei werden per Flugplattform gesammelte Orthofotos – maßstabsgetreue Luftaufnahmen der Erdoberfläche – zur Erzeugung von digitalen Geländemodellen oder für die Erstellung von Karten für Geoinformationssysteme genutzt. Im Bereich der Inspektion, hinsichtlich der detaillierten Begutachtung von Infrastrukturen, kommen allerdings bislang nur sehr begrenzt unbemannte Fluggeräte zum Einsatz, bedingt durch den meist urbanen Einsatzraum und dem Fliegen nahe an Hindernissen. Während sich die Masse der UAS-Anwendungen in größeren Höhen abspielt und damit die kritische Kenngröße nur die Flughöhe darstellt, werden diese Systeme nicht mit entsprechender Kollisionssensorik ausgestattet und navigieren auf der Basis von GPS oder durch manuelle Steuerung. Die bislang gezeigten Ansätze für Inspektionsaufgaben spiegeln bislang jedoch lediglich das Potenzial der Technik wider und sind nach jetzigem Stand aufgrund geltender Sicherheitsanforderungen noch nicht auf breiter Front für solche Zwecke kommerzialisiert.
Technik und Sicherheit
Das Fraunhofer-Institut für Zerstörungsfreie Prüfverfahren (IZFP) setzt zu diesem Zweck seit 2009 verschiedene UAS in Form von Multirotor-Hubschrauber-Plattformen ein, die für die optische Gebäudeinspektion genutzt werden. Diese in den letzten Jahren aufgekommene Technik der Multirotor-Systeme bietet neben der im Vergleich zu einem herkömmlichen Hubschrauberkonzept sehr einfachen Mechanik einen sehr günstigen Aufbau hinsichtlich diverser Nutzlastkonzepte. Die mehrmotorigen, elektrogetriebenen Plattformen können mit verschiedenen Sensoren ausgerüstet und dem Einsatzzweck entsprechend individuell angepasst werden. Aufgrund ihrer geringen Größe können die Systeme problemlos auch in engen Bereichen oder urbanen Gebieten zur Anwendung kommen. Dies wird unterstützt durch die Fähigkeit des senkrechten Startens und Landens, einhergehend mit einer stabilen Schwebeflugeigenschaft, welche gleichermaßen Anforderung und Ziel für eine punktuelle und detaillierte Schadensaufnahme darstellt. Die redundante Ausführung des Antriebs gewährleistet zudem auch bei mehrfachem Motorausfall noch eine kontrollierte Rückholung des Systems, wobei dank des niedrigen Gesamtgewichts von wenigen Kilogramm selbst im Falle eines Verlusts des Fluggerätes kein relevantes Risiko für die eventuell involvierte Infrastruktur besteht. Das mit verschiedenen Sensoren ausgestattete UAS wird von einer mikrocontrollergesteuerten Flugzustandsregelung, dem "Autopiloten", stabilisiert und kann grundsätzlich mittels GPS-Wegpunkten oder manuell navigiert werden.
Die erwähnten Anmerkungen in Bezug auf die Sicherheitsaspekte mögen hier noch einmal kurz aufgegriffen werden: Im Bereich der unbemannten Luftfahrzeuge unterscheidet man nach verschiedenen UAS-Klassifizierungen, die sich durch Größenbeschränkungen, Gewichtslimits oder das jeweilige Einsatzgebiet aufstellen. Diese allgemeinen Kategorien umfassen sowohl Flugzeuge und Hubschrauber als auch jegliche anderen Arten unbemannter Luftfahrzeuge. Aufgrund versicherungsrechtlicher Forderungen ist zurzeit der Einsatz von unbemannten Flugsystemen außerhalb von Modellflugplätzen auf ein maximales Abfluggewicht von 5 kg beschränkt, an das entsprechend auch die für die Gebäudeinspektion genutzten UAS gebunden sind. Bedingt durch den oft hohen Bebauungsgrad und den damit verbundenen Verkehr müssen auch die Risiken für Personen- und Infrastrukturschäden minimiert werden. Dementsprechend kommt dem Faktor Redundanz im Bereich der Einzelsysteme und auch des Gesamtsystems, also der Ausfallsicherheit flugwichtiger Funktionen, große Bedeutung zu. Sicherheitsaspekte, wie die erwähnte kontrollierte Rückholung selbst bei teilweisem Motorausfall, sind wichtiger Bestandteil von UAS-Applikationen, gerade bei Einsätzen in innerstädtischen Gebieten. Da auch für kleine Flugplattformen eine Flugerlaubnis bei der zuständigen Landesbehörde einzuholen ist, werden zumeist auch Ordnungsämter und Straßenbetriebe in den Genehmigungsprozess eingebunden, die entsprechend den örtlichen Gegebenheiten mit über den tatsächlichen Inspektionsumfang entscheiden. Dies trifft vor allem auf Gebäude zu, die sich nahe an stark frequentierten Verkehrswegen oder vielbesuchten Plätzen befinden. Da die Leistungsfähigkeit der UAS derzeit noch stark durch die gesetzlichen Sicherheitsvorkehrungen beschränkt wird, liegt einer der aktuellen Forschungsschwerpunkte auf dem Ausbau der Automatisierung, mit besonderem Augenmerk auf dem Aspekt der sicheren Navigation. Langfristiges Ziel ist es, dass die Applikation zukünftig nur noch von einer eingewiesenen Person überwacht werden muss, während die eigentliche Inspektionsbefliegung möglichst autonom durchgeführt wird.
Anwendungen für UAS in der zfP
Die Einsatzmöglichkeiten der luftgestützten Inspektion für die zerstörungsfreie Prüfung konzentrieren sich auf die Bereiche Zustandserfassung, Schadensdiagnose und Monitoring. Für die Gebäudeinspektion als Teil des Bereiches der Zustandserfassung sind zahlreiche Verfahren für die zfP verfügbar. Die Untersuchung kann beispielsweise auf visueller Basis, per Radar, Lidar, Ultraschall oder auch mittels Infrarot erfolgen. Die hier genannten Methoden lassen sich wiederum in drei wesentliche Aspekte unterteilen: sowohl die optische als auch die infrarote Variante bieten – monoskopischer Betrieb vorausgesetzt – nur eine zweidimensionale Datengrundlage, während Radar- und Lidar-Anwendungen die für eine spätere Schadensanalyse wichtige zusätzliche Tiefeninformation liefern; sich von den beiden vorangehenden Aspekten abgrenzend ergibt sich als drittes die berührungsbehaftete Variante durch Ultraschallmessung, welche sich allerdings durch die Tatsache eines notwendigen Andockens der Flugplattform an die Gebäudestruktur als ungeeignetste darstellt. Obwohl alle diese Verfahren im Bauwesen in der zfP bereits seit Langem auf konventionelle Weise zum Einsatz kommen, ergeben sich für die luftgestützte Nutzung mittels UAS zahlreiche Einschränkungen, welche sonst nur peripher oder oft überhaupt nicht zum Tragen kommen. Da die UAS-Nutzung als kleiner Bestandteil der Robotik noch nicht in der zfP etabliert ist und erst nach und nach für immer mehr Anwendungen hinzugezogen wird, gibt es gerade bei der zur Verfügung stehenden Sensorik große Probleme. Aufgrund der Auslegung der Sensoren für bodengebundene Anwendungen spielen sowohl Gewichtsbeschränkungen als auch Fragen hinsichtlich der Stromversorgung und Kommunikation der Sensorhardware, wenn überhaupt, nur eine untergeordnete Rolle. Dies führt dazu, dass die Auswahl an passenden Sensoren drastisch eingeschränkt wird, sobald es um die Integration und Betreibung in einem Mikro-UAS geht. Während die aktuellen Entwicklungen an geeigneten visuellen und auch thermografischen Kameras zunehmend eine Integration erlauben, ist beispielsweise der Einbau eines Radars selbst mit modernsten technischen Mitteln kaum realisierbar.
Während diese aufgelisteten zfP-Verfahren grundsätzlich für die Infrastrukturinspektion mittels UAS verfügbar sind, stehen aktuell vornehmlich optische Verfahren im Vordergrund – weil in den meisten Fällen keine Bilddaten für eine erste schnelle Vorabbegutachtung vorliegen, sodass der Bedarf nach einer rein visuellen Dokumentation hier am größten ist. Entsprechend dieser Ausgangsbasis und der aktuellen Flugplattformen werden die Gebäudeinspektionen am IZFP daher meist mit visuellen, hochauflösenden Fotokameras durchgeführt. Bei den Kameras handelt es sich um kommerzielle Digitalkameras mit nutzbaren Auflösungen von 12 bis 18 Megapixel sowie Brennweiten von 5,0-60 mm. Bei Kameras mit digitalem Zoom wird diese Funktion hinsichtlich einer möglichst hohen Bildqualität grundsätzlich deaktiviert.
Visuelle Gebäudeinspektion
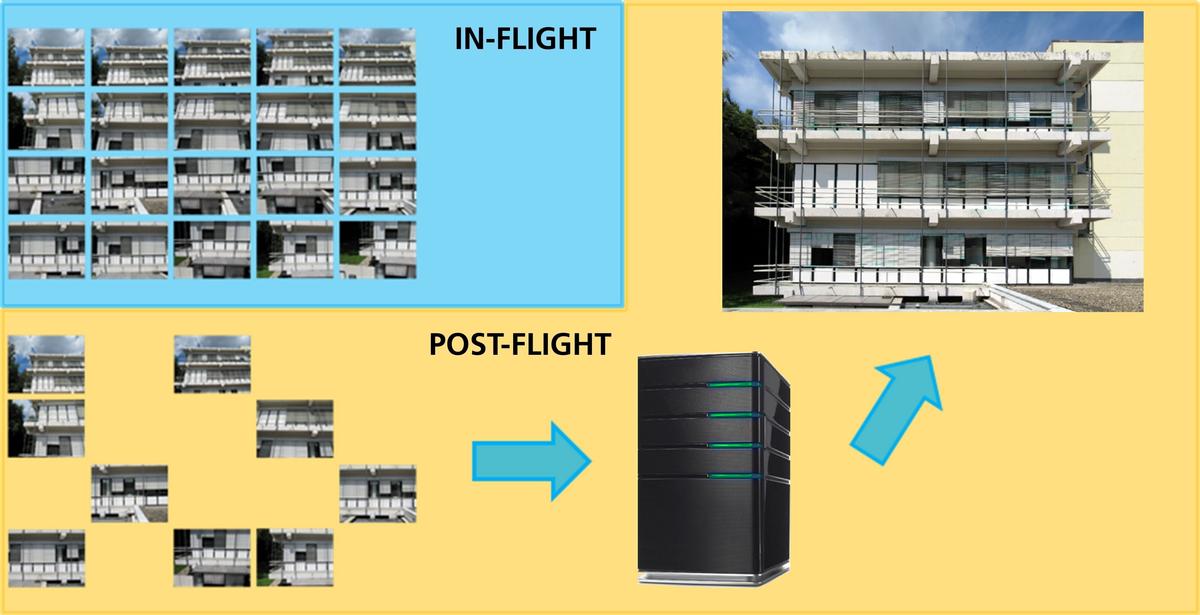
Das Verfahren der visuellen Gebäudeinspektion mittels UAS ist in zwei Prozessschritte aufgeteilt, und zwar die Datenakquisition durch Befliegung (in-flight) und die digitale Nachbearbeitung (post-flight).
Im Vordergrund des Einsatzes des UAS steht die Datenakquisition des zu untersuchenden Gebäudes. Zur Datenaufnahme wird die Kamera über eine automatische Foto-Auslösesequenz gesteuert, welche auf eine Frequenz von bis zu drei Bildern pro Sekunde eingestellt werden kann. Optional kann in die Kamerakontrolle auch manuell eingegriffen und dabei Zoom, Fokussierung und Auslösung betätigt werden, falls dies situationsbedingt erforderlich sein sollte. Zur optimalen Schadenserfassung im Flug kann als Hilfestellung sowohl für die automatische Aufnahme als auch die manuelle Ausrichtung der Kamera auf eine Echtzeit-Videoverbindung zurückgegriffen werden, die dann vom Piloten oder einer zweiten Person für die Schadenszentrierung genutzt wird.
Nach Abschluss der Gebäudebefliegung erfolgt als zweiter Schritt die digitale Nachbearbeitung ausgesuchter Bilder. Hierzu wird der Datenspeicher der Kamera nach der Landung ausgelesen und an einen externen Rechner übertragen. Bedingt durch die automatische Auslösung der Kamera, fallen pro Befliegung sehr hohe Datenmengen an; so werden bei einem knapp 15-minütigen Flug ca. 1.200 Aufnahmen erzeugt. Zwar wird eine derart große Zahl an Aufnahmen nicht für die spätere Schadensdarstellung benötigt, jedoch entsteht durch den nicht vollkommen ruhigen Schwebeflug – bedingt durch nicht herausgefilterte Restvibrationen der Plattform oder auch äußere Einflüsse wie Windböen – ein relativ hoher Prozentsatz an qualitativ nicht verwendbaren Bilddaten. Ebenso liegt oft eine sehr hohe Überlappung der einzelnen Bilder untereinander vor, welche je nach Schwebefluggeschwindigkeit parallel zur Gebäudefassade schwankt. Bei zu hoher Überlappung werden dementsprechend nicht benötigte Datensätze eliminiert, um Doppel- bzw. Mehrfach-Information innerhalb der Bilder zu vermeiden. Grund hierfür ist, dass für die spätere Bilderzeugung eine sehr hohe Hardware-Rechenleistung erforderlich ist, sodass die Bilddatenbasis entsprechend der angestrebten Qualität nur so groß wie nötig sein sollte. Sobald die Eliminierung nicht benötigter Datensätze abgeschlossen ist, erfolgt die Bilderzeugung mittels einer Stitching-/Mosaikierungs-Software. Diese arbeitet auf Basis einer Mustererkennung, welche gleiche Bildinhaltsstrukturen, sogenannte Matching Points, in zwei oder mehreren Bildern sucht und anhand dieser dann miteinander verknüpft. Wichtig ist hier eine gute algorithmische Optimierung vor allem hinsichtlich der leicht variierenden Bildwinkel bei der Aufnahme, durch welche Übergangssprünge oder Verzerrungseffekte auftreten können. Treten dennoch kleine Unregelmäßigkeiten auf, können die unzureichenden Verknüpfungszonen manuell nachbearbeitet und damit geglättet werden.
Diese Bilder-Datenbasis dient dann zum Aufbau eines hochauflösenden digitalen 2D/3D-Fassadenmodells, dessen Größenordnung sich im mehrfachen Gigapixel-Bereich bewegt. Anhand eines derartigen Modells kann eine abschnittsweise Begutachtung der Gebäudefassaden erfolgen und zudem sehr exakt der aktuelle Gebäudezustand zu einem bestimmten Zeitpunkt erfasst werden, d. h. genau diese Fassadenmodelle dienen später als entsprechende Dokumentationsgrundlage für Monitoring-Zwecke.
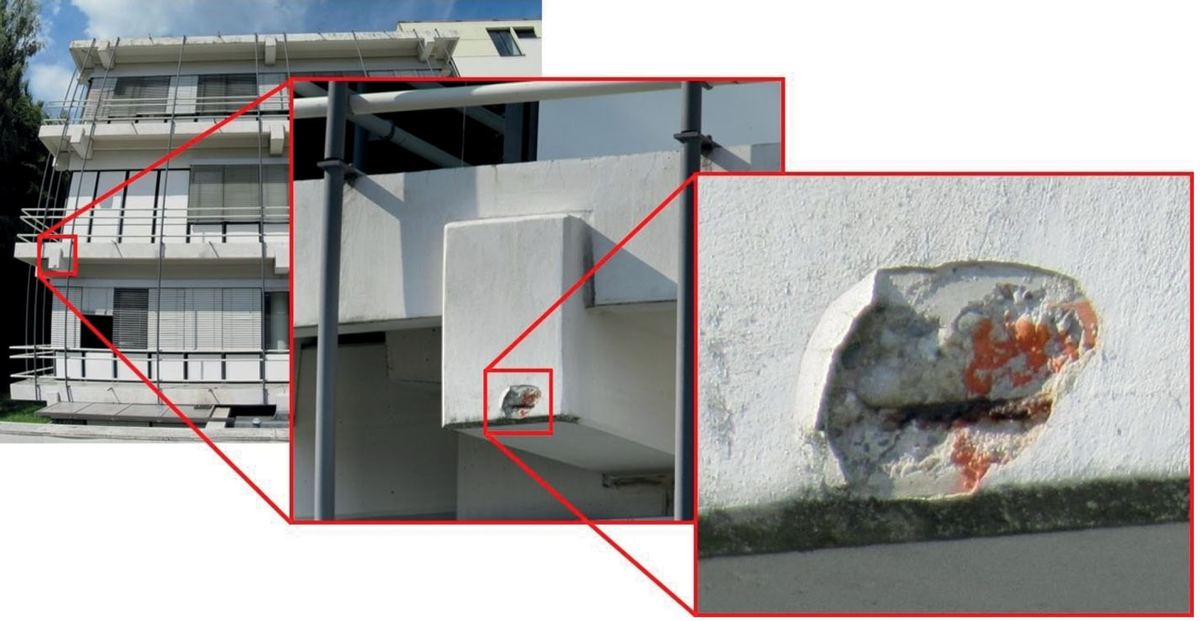
Da die digitalen Fassadenrekonstruktionen aus sehr großen Datenmengen erzeugt werden, kann durch die hohe Bildauflösung auch bereits eine sehr detaillierte Schadenserkennung und -zuordnung vorgenommen werden. So können mit diesem Verfahren beliebige Bereiche des Gebäudes zur exakten Untersuchung immer weiter vergrößert werden, so dass selbst minimale Schäden oder auch Risse von nur wenigen Zehntel Millimeter Breite identifiziert werden können. Durch die enormen Bilddatenmengen ist selbst eine Vergrößerung auf über die reale Gebäudegröße hinweg möglich, ohne dabei eine qualitative Beeinträchtigung der Begutachtung in Kauf zu nehmen. Diese Detailbegutachtung kommt besonders einer noch präziseren Schadensbewertung als bisher zugute und ist gerade bei kritischen Bereichen von großem Interesse.
Fazit
Das Verfahren der luftgestützten Inspektion mit unbemannten Flugsystemen zeigt, dass die Nutzung von UAS ein geeignetes Mittel für die zum Gebäude-Monitoring erforderliche Bildung einer Datenbasis darstellt. Mit der in das Fluggerät integrierten Sensorik können relativ schnell und unkompliziert sowohl großflächige als auch punktuelle Untersuchungen an Infrastrukturen durchgeführt werden. Durch zahlreiche Befliegungen der letzten Jahre an verschiedenen Gebäuden, für die anschließend in Form von 2D- & 3D-Modellen eine digitale Zustandsdokumentation erstellt wurde, hat sich gezeigt, dass bereits die optische Aufnahmetechnik wertvolle Aussagen über die tatsächlichen Gebäudezustände erlaubt. Durch die visuelle und thermographische Inspektion auch von schwer zugänglichen Bauwerksbereichen wird eine deutliche Verbesserung hinsichtlich der Aussagen zum Thema Schadenserkennung und -auswertung sowie notwendiger Reparaturmaßnahmen ermöglicht. Die Inspektion von Infrastrukturen mittels Befliegung bildet damit eine mögliche Grundlage für neue Ergebnisse bei Untersuchungen zur Zustandserfassung und Qualitätssicherung im Bereich zukünftiger zfP-Applikationen.
Autoren: Christian Eschmann
- Über diese
Datenseite - Product-ID
6229 - Veröffentlicht am:
25.04.2013 - Geändert am:
11.12.2014